Intégration de la détection d’images 2D et 3D dans l’IoT
Le livre blanc « Capteurs intelligents – Rendre possible l’Internet intelligent des objets » aborde les principales tendances du développement des capteurs ainsi que la manière dont les technologies de détection telles que le radar, le LiDAR et l’imagerie du temps de vol fournissent encore plus d’informations en permettant aux systèmes de percevoir des objets dans l’espace 3D. Ce blog est une extension de cela, se concentrant sur la façon d’utiliser l’approche d’ouverture des pixels pour extraire les informations détaillées d’un capteur d’image CMOS et créer des images 2D normales, ainsi que des circuits de pixels, et sur la façon de surmonter les obstacles d’un système de détection d’images 3D.
Aujourd’hui, les images et les vidéos 3D sont devenues populaires dans notre vie quotidienne. Comment intégrer et combiner du contenu 3D avec du contenu 2D est un sujet très important. En général, deux images bidimensionnelles de deux perspectives différentes peuvent être utilisées pour créer une image tridimensionnelle, car ce mécanisme imite la perception de l’œil humain.
Par exemple, une caméra 3D doit enregistrer deux images en même temps et afficher deux images visibles aux yeux droit et gauche des humains pour la perception 3D. Cette perception peut être considérée comme une approche passive. D’autre part, le mode actif peut être utilisé avec la source lumineuse pour déterminer la profondeur de l’objet. Sur la base des propriétés de la lumière réfléchie, une image tridimensionnelle peut être créée grâce à des calculs de post-traitement. En particulier, l’activité de temps de vol (TOF) est une estimation du temps de parcours de la lumière parallèle qui est émise par une source lumineuse, atteint un objet, est réfléchie par un objet et atteint un capteur. La profondeur des objets peut facilement être déduite des différents temps de parcours enregistrés en pixels.
Des capteurs d’images bidimensionnelles et tridimensionnelles sont combinés sur la base des mêmes diodes électroluminescentes. En modes 2D et 3D, le circuit à double échantillonnage corrélé (CDS) et le convertisseur temps-numérique (TDC) sont adoptés ou modifiés. Les circuits de lecture utilisent la lecture linéaire et parallèle en modes 2D et 3D, respectivement. En conséquence, un TDC multicanal est utilisé pour obtenir une lecture parallèle.
Capteur d’images intégré 2D/3D
Pour intégrer efficacement les capteurs d’images 2D et 3D, le photodiode P-diffusion_N-well_ P-substrate est adopté et contrôlé pour fonctionner en modes de détection de photos 2D et 3D. Dans un mode 2D, le circuit CDS et le circuit de lecture CDS sont intégrés, ainsi qu’un décodeur de ligne, un décodeur de colonne et un contrôleur. En mode 3D, des amplificateurs de détection (SA), une lecture TDC et un TDC sont mis en œuvre. Le SA augmente d’une impulsion de déclenchement par pixel pour réduire le temps de lecture d’un pixel à un TDC. La figure 1 montre un schéma fonctionnel du capteur d’images 2D/3D Capteurs d’image.

Figure 1 : Schéma fonctionnel du capteur d’images intégré 2D/3D
Circuits de pixels
Dans un mode 2D, l’objectif principal est d’acquérir des informations sur le niveau de gris. La plage dynamique est donc le facteur principal. Une gamme dynamique plus étendue révèle une gamme plus étendue de courants lumineux qui sont détectés. Le circuit de pixels en mode 2D, illustré sur la figure 2, offre un chemin supplémentaire pour ralentir la saturation de charge. Un tel chemin fournit une alimentation en charge pour compenser la photodissipation actuelle.
Figure 2 : Circuits de pixels 2D
En mode 3D, le circuit de pixels détecte les objets avec les informations de profondeur. La photodiode est polarisée en inverse près de l’avalanche. Une fois que la photodiode détecte un photon, elle induit un courant important. C’est ce qu’on appelle le mode Geiger. Ce phénomène amène le circuit de pixels à détecter rapidement les photons. La figure 3 illustre le circuit de pixels 3D.
Figure 3 : Circuits de pixels 3D
Lorsque le circuit de pixels accepte un déclencheur lumineux, la photodiode génère un courant important de lumière qui traverse le transistor PMOS, M1, qui agit comme une résistance. Le nœud N de la photodiode produit une chute de tension qui est accélérée par un onduleur. Lors de la réinitialisation, le pixel est opéré dans une phase de charge dans laquelle le nœud N de la photodiode est polarisé en Vdd. Le transistor PMOS, M4, qui se connecte à un onduleur, et le transistor NMOS, M5, qui se connecte à la terre forment un chemin de rétroaction pull-down. Après le redémarrage, la photodiode commence à détecter les photos et effectue une action de décharge. Pendant ce temps, M4 et M5 sont allumés pour diminuer rapidement la tension de l’onduleur à 1/2 Vdd. La figure 4 illustre le circuit de pixels 2D/3D intégré qui peut être facilement manipulé et commuté à l’aide de signaux de commande 2D et 3D.
Figure 4 : Circuit de pixels intégré 2D/3D
TDC multicanal
Un système de détection d’images 3D est confronté à un problème en raison du nombre de circuits de temporisation. Pour utiliser des circuits de temporisation traditionnels, chaque pixel avec son circuit de temporisation correspondant pour le calcul de la profondeur présente un certain nombre d’inconvénients : trop de circuits de temporisation représentant une grande surface matérielle et une forte consommation d’énergie. Par conséquent, le TDC multicanal composé d’un TDC en anneau, d’un codeur thermique et d’un compteur 4 bits est utilisé pour résoudre les inconvénients susmentionnés. Un TDC en anneau à 15 étages est conçu comme le cœur d’un circuit de temporisation multicanal. Lorsque le signal de démarrage est actif, une grille NAND et 14 onduleurs forment une oscillation. 15 sorties d’un TDC en anneau sont compressées par un codeur thermique pour produire un résultat précis de 4 bits qui est stocké dans une matrice de verrouillage. En même temps, le compteur produit un résultat approximatif de 4 bits qui est également stocké dans le tableau de verrouillage. L’en-tête de 4 bits et les résultats précis peuvent interpréter les informations détaillées.
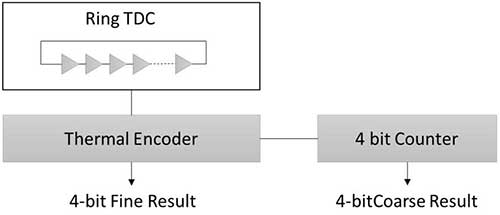
Figure 5 : TDC multicanal
Fonctionnement du capteur
Lors d’une mesure 3D, le signal externe réinitialise le circuit de pixels, fait osciller le TDC et déclenche l’émission de lumière. Le capteur attend la lumière réfléchie par les objets et calcule le temps de parcours en fonction du TDC. La profondeur de l’objet peut être déterminée sur la base du temps de parcours mesuré.

Figure 6 : Fonctionnement du capteur
Ici, une carte FPGA est programmée pour contrôler l’évolutivité du système d’enregistrement d’images 2D et 3D en fonction du capteur TOF. La profondeur de la boîte cylindrique est calculée en fonction du temps de vol mesuré des diodes électroluminescentes à 850 nm. Les images 2D/3D sont générées par le logiciel exécuté sur le PC.
Pour en savoir plus sur les capteurs intelligents et les principales tendances en matière de développement de capteurs, lisez notre livre blanc intitulé Capteurs intelligents – Rendre possible l’Internet intelligent des objets
Stay informed
Keep up to date on the latest information and exclusive offers!
Subscribe now
Thanks for subscribing
Well done! You are now part of an elite group who receive the latest info on products, technologies and applications straight to your inbox.
En savoir plus sur :
Intégration de la détection d’images 2D et 3D dans l’IoT
Appareils intelligents avec capteurs intelligents et fusion des capteurs
Manipulation de données dans l’écosystème des capteurs intelligents
Technologie sans fil Bluetooth 5 pour capteurs intelligents IoT
Industrie 4.0 – L’informatique en périphérie dans l’environnement industriel (livre blanc)





